Chapter 10 Rotational Motion and Angular Momentum
10.6 Collisions of Extended Bodies in Two Dimensions
Summary
- Observe collisions of extended bodies in two dimensions.
- Examine collision at the point of percussion.
Bowling pins are sent flying and spinning when hit by a bowling ball—angular momentum as well as linear momentum and energy have been imparted to the pins. (See Figure 1). Many collisions involve angular momentum. Cars, for example, may spin and collide on ice or a wet surface. Baseball pitchers throw curves by putting spin on the baseball. A tennis player can put a lot of top spin on the tennis ball which causes it to dive down onto the court once it crosses the net. We now take a brief look at what happens when objects that can rotate collide.
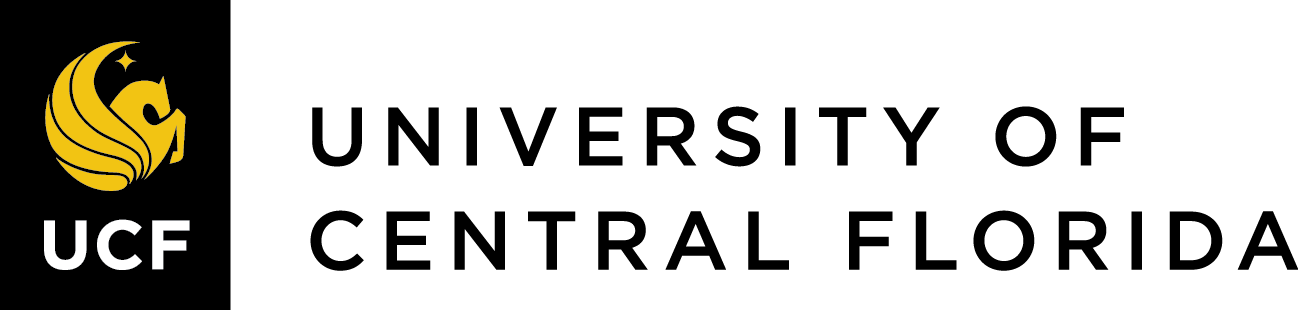
Consider the relatively simple collision shown in Figure 2, in which a disk strikes and adheres to an initially motionless stick nailed at one end to a frictionless surface. After the collision, the two rotate about the nail. There is an unbalanced external force on the system at the nail. This force exerts no torque because its lever arm [latex]{r}[/latex] is zero. Angular momentum is therefore conserved in the collision. Kinetic energy is not conserved, because the collision is inelastic. It is possible that momentum is not conserved either because the force at the nail may have a component in the direction of the disk’s initial velocity. Let us examine a case of rotation in a collision in Example 1.

Example 1: Rotation in a Collision
Suppose the disk in Figure 2 has a mass of 50.0 g and an initial velocity of 30.0 m/s when it strikes the stick that is 1.20 m long and 2.00 kg.
(a) What is the angular velocity of the two after the collision?
(b) What is the kinetic energy before and after the collision?
(c) What is the total linear momentum before and after the collision?
Strategy for (a)
We can answer the first question using conservation of angular momentum as noted. Because angular momentum is [latex]{I\omega},[/latex] we can solve for angular velocity.
Solution for (a)
Conservation of angular momentum states
where primed quantities stand for conditions after the collision and both momenta are calculated relative to the pivot point. The initial angular momentum of the system of stick-disk is that of the disk just before it strikes the stick. That is,
where [latex]{I}[/latex] is the moment of inertia of the disk and [latex]{\omega}[/latex] is its angular velocity around the pivot point. Now, [latex]{I=mr^2}[/latex] (taking the disk to be approximately a point mass) and [latex]{\omega=v/r},[/latex] so that
After the collision,
It is [latex]{\omega^{\prime}}[/latex] that we wish to find. Conservation of angular momentum gives
Rearranging the equation yields
where [latex]{I^{\prime}}[/latex] is the moment of inertia of the stick and disk stuck together, which is the sum of their individual moments of inertia about the nail. Chapter 10.3 Making Connections gives the formula for a rod rotating around one end to be [latex]{I=Mr^2/3}.[/latex] Thus,
Entering known values in this equation yields,
The value of [latex]{I^{\prime}}[/latex] is now entered into the expression for [latex]{\omega^{\prime}},[/latex] which yields
Strategy for (b)
The kinetic energy before the collision is the incoming disk’s translational kinetic energy, and after the collision, it is the rotational kinetic energy of the two stuck together.
Solution for (b)
First, we calculate the translational kinetic energy by entering given values for the mass and speed of the incoming disk.
After the collision, the rotational kinetic energy can be found because we now know the final angular velocity and the final moment of inertia. Thus, entering the values into the rotational kinetic energy equation gives
Strategy for (c)
The linear momentum before the collision is that of the disk. After the collision, it is the sum of the disk’s momentum and that of the center of mass of the stick.
Solution of (c)
Before the collision, then, linear momentum is
After the collision, the disk and the stick’s center of mass move in the same direction. The total linear momentum is that of the disk moving at a new velocity [latex]{v^{\prime}=r\omega^{\prime}}[/latex] plus that of the stick’s center of mass,
which moves at half this speed because [latex]{v_{\text{CM}}=(\frac{r}{2})\omega^{\prime}=\frac{v^{\prime}}{2}}.[/latex] Thus,
Gathering similar terms in the equation yields,
so that
Substituting known values into the equation,
Discussion
First note that the kinetic energy is less after the collision, as predicted, because the collision is inelastic. More surprising is that the momentum after the collision is actually greater than before the collision. This result can be understood if you consider how the nail affects the stick and vice versa. Apparently, the stick pushes backward on the nail when first struck by the disk. The nail’s reaction (consistent with Newton’s third law) is to push forward on the stick, imparting momentum to it in the same direction in which the disk was initially moving, thereby increasing the momentum of the system.
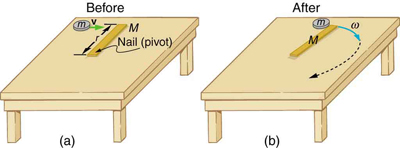
The above example has other implications. For example, what would happen if the disk hit very close to the nail? Obviously, a force would be exerted on the nail in the forward direction. So, when the stick is struck at the end farthest from the nail, a backward force is exerted on the nail, and when it is hit at the end nearest the nail, a forward force is exerted on the nail. Thus, striking it at a certain point in between produces no force on the nail. This intermediate point is known as the percussion point.
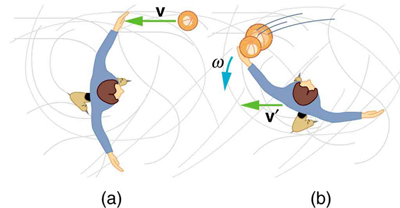
An analogous situation occurs in tennis as seen in Figure 3. If you hit a ball with the end of your racquet, the handle is pulled away from your hand. If you hit a ball much farther down, for example, on the shaft of the racquet, the handle is pushed into your palm. And if you hit the ball at the racquet’s percussion point (what some people call the “sweet spot”), then little or no force is exerted on your hand, and there is less vibration, reducing chances of a tennis elbow. The same effect occurs for a baseball bat.
Check Your Understanding
1: Is rotational kinetic energy a vector? Justify your answer.
Section Summary
- Angular momentum [latex]{L}[/latex] is analogous to linear momentum and is given by [latex]{L=I\omega}.[/latex]
- Angular momentum is changed by torque, following the relationship [latex]{\text{net }\tau=\frac{\Delta{L}}{\Delta{t}}}.[/latex]
- Angular momentum is conserved if the net torque is zero [latex]{L=\text{ constant }(\text{net }\tau=0)}[/latex] or [latex]{L=L^{\prime}(\text{net }\tau=0)}.[/latex] This equation is known as the law of conservation of angular momentum, which may be conserved in collisions.
Conceptual Questions
1: Describe two different collisions—one in which angular momentum is conserved, and the other in which it is not. Which condition determines whether or not angular momentum is conserved in a collision?
2: Suppose an ice hockey puck strikes a hockey stick that lies flat on the ice and is free to move in any direction. Which quantities are likely to be conserved: angular momentum, linear momentum, or kinetic energy (assuming the puck and stick are very resilient)?
3: While driving his motorcycle at highway speed, a physics student notices that pulling back lightly on the right handlebar tips the cycle to the left and produces a left turn. Explain why this happens.
Problems & Exercises
Problems & Exercises
1: Repeat Example 1 in which the disk strikes and adheres to the stick 0.100 m from the nail.
2: Repeat Example 1 in which the disk originally spins clockwise at 1000 rpm and has a radius of 1.50 cm.
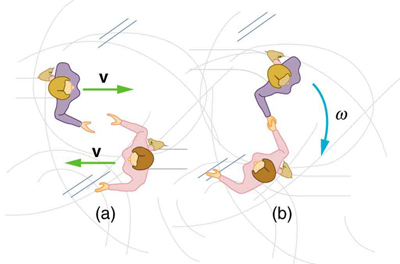
3: Twin skaters approach one another as shown in Figure 4 and lock hands. (a) Calculate their final angular velocity, given each had an initial speed of 2.50 m/s relative to the ice. Each has a mass of 70.0 kg, and each has a center of mass located 0.800 m from their locked hands. You may approximate their moments of inertia to be that of point masses at this radius. (b) Compare the initial kinetic energy and final kinetic energy.
4: Suppose a 0.250-kg ball is thrown at 15.0 m/s to a motionless person standing on ice who catches it with an outstretched arm as shown in Figure 5.
(a) Calculate the final linear velocity of the person, given his mass is 70.0 kg.
(b) What is his angular velocity if each arm is 5.00 kg? You may treat the ball as a point mass and treat the person’s arms as uniform rods (each has a length of 0.900 m) and the rest of his body as a uniform cylinder of radius 0.180 m. Neglect the effect of the ball on his center of mass so that his center of mass remains in his geometrical center.
(c) Compare the initial and final total kinetic energies.
5: Repeat Example 1 in which the stick is free to have translational motion as well as rotational motion.
Solutions
Check Your Understanding
1: No, energy is always scalar whether motion is involved or not. No form of energy has a direction in space and you can see that rotational kinetic energy does not depend on the direction of motion just as linear kinetic energy is independent of the direction of motion.
Problems & Exercises
1:
(a) [latex]{0.156\text{ rad/s}}[/latex]
(b) [latex]{1.17\times10^{-2}\text{ J}}[/latex]
(c) [latex]{0.188\text{ kg}\cdotp\text{m/s}}[/latex]
3:
(a) 3.13 rad/s
(b) Initial KE = 438 J, final KE = 438 J
5:
(a) 1.70 rad/s
(b) Initial KE = 22.5 J, final KE = 2.04 J
(c) [latex]{1.50\text{ kg}\cdotp\text{m/s}}[/latex]
