Chapter 4 Dynamics: Force and Newton’s Laws of Motion
4.5 Normal, Tension, and Other Examples of Forces
Summary
- Define normal and tension forces.
- Apply Newton’s laws of motion to solve problems involving a variety of forces.
- Use trigonometric identities to resolve weight into components.
Forces are given many names, such as push, pull, thrust, lift, weight, friction, and tension. Traditionally, forces have been grouped into several categories and given names relating to their source, how they are transmitted, or their effects. The most important of these categories are discussed in this section, together with some interesting applications. Further examples of forces are discussed later in this text.
Normal Force
Weight (also called force of gravity) is a pervasive force that acts at all times and must be counteracted to keep an object from falling. You definitely notice that you must support the weight of a heavy object by pushing up on it when you hold it stationary, as illustrated in Figure 1(a). But how do inanimate objects like a table support the weight of a mass placed on them, such as shown in Figure 1(b)? When the bag of dog food is placed on the table, the table actually sags slightly under the load. This would be noticeable if the load were placed on a card table, but even rigid objects deform when a force is applied to them. Unless the object is deformed beyond its limit, it will exert a restoring force much like a deformed spring (or trampoline or diving board). The greater the deformation, the greater the restoring force. So when the load is placed on the table, the table sags until the restoring force becomes as large as the weight of the load. At this point the net external force on the load is zero. That is the situation when the load is stationary on the table. The table sags quickly, and the sag is slight so we do not notice it. But it is similar to the sagging of a trampoline when you climb onto it.
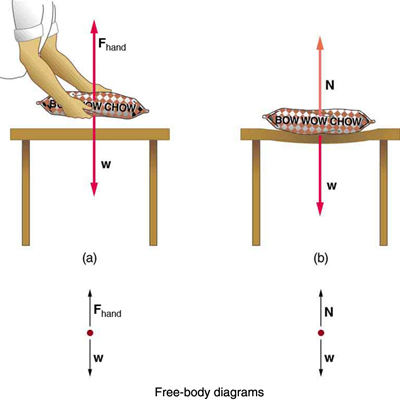
We must conclude that whatever supports a load, be it animate or not, must supply an upward force equal to the weight of the load, as we assumed in a few of the previous examples. If the force supporting a load is perpendicular to the surface of contact between the load and its support, this force is defined to be a normal force and here is given the symbol [latex]\textbf{N}.[/latex] (This is not the unit for force N.) The word normal means perpendicular to a surface. The normal force can be less than the object’s weight if the object is on an incline, as you will see in the next example.
COMMON MISCONCEPTIONS: NORMAL FORCE (N) VS. NEWTON (N)
In this section we have introduced the quantity normal force, which is represented by the variable [latex]\textbf{N}.[/latex] This should not be confused with the symbol for the newton, which is also represented by the letter N. These symbols are particularly important to distinguish because the units of a normal force ( [latex]\textbf{N}[/latex] ) happen to be newtons (N). For example, the normal force [latex]\textbf{N}[/latex] that the floor exerts on a chair might be [latex]{\textbf{N}=100\text{ N}}.[/latex] One important difference is that normal force is a vector, while the newton is simply a unit. Be careful not to confuse these letters in your calculations! You will encounter more similarities among variables and units as you proceed in physics. Another example of this is the quantity work ( [latex]{W}[/latex] ) and the unit watts (W).
Example 1: Weight on an Incline, a Two-Dimensional Problem
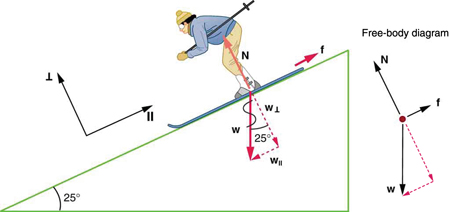
Consider the skier on a slope shown in Figure 2. Her mass including equipment is 60.0 kg. (a) What is her acceleration if friction is negligible? (b) What is her acceleration if friction is known to be 45.0 N?
Strategy
This is a two-dimensional problem, since the forces on the skier (the system of interest) are not parallel. The approach we have used in two-dimensional kinematics also works very well here. Choose a convenient coordinate system and project the vectors onto its axes, creating two connected one-dimensional problems to solve. The most convenient coordinate system for motion on an incline is one that has one coordinate parallel to the slope and one perpendicular to the slope. (Remember that motions along mutually perpendicular axes are independent.) We use the symbols [latex]\perp[/latex] and [latex]\parallel[/latex] to represent perpendicular and parallel, respectively. This choice of axes simplifies this type of problem, because there is no motion perpendicular to the slope and because friction is always parallel to the surface between two objects. The only external forces acting on the system are the skier’s weight, friction, and the support of the slope, respectively labeled [latex]\textbf{w},[/latex] and [latex]\textbf{N}[/latex] in Figure 2. [latex]\textbf{N}[/latex] is always perpendicular to the slope, and [latex]\textbf{f}[/latex] is parallel to it. But [latex]\textbf{w}[/latex] is not in the direction of either axis, and so the first step we take is to project it into components along the chosen axes, defining [latex]{w_{\parallel}}[/latex] to be the component of weight parallel to the slope and [latex]{w_{\perp}}[/latex] the component of weight perpendicular to the slope. Once this is done, we can consider the two separate problems of forces parallel to the slope and forces perpendicular to the slope.
Solution
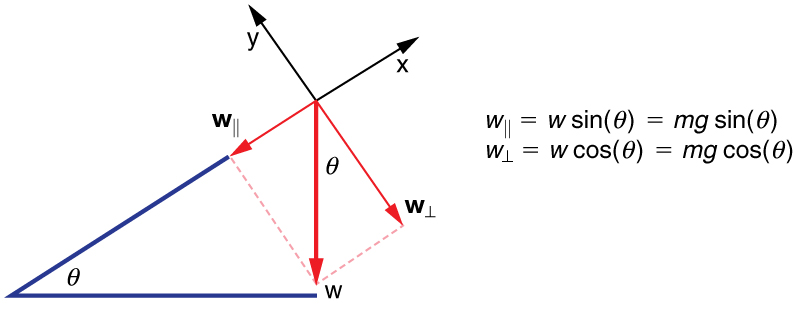
The magnitude of the component of the weight parallel to the slope is [latex]{w_{\parallel} =w\:\text{sin}\:(25^{\circ})=mg\:\text{sin}\:(25^{\circ})},[/latex] and the magnitude of the component of the weight perpendicular to the slope is [latex]{w_{\perp}=w\:\text{cos}\:(25^{\circ})=mg\:\text{cos}\:(25^{\circ})}.[/latex]
(a) Neglecting friction. Since the acceleration is parallel to the slope, we need only consider forces parallel to the slope. (Forces perpendicular to the slope add to zero, since there is no acceleration in that direction.) The forces parallel to the slope are the amount of the skier’s weight parallel to the slope [latex]{w_{\parallel}}[/latex] and friction [latex]{f}.[/latex] Using Newton’s second law, with subscripts to denote quantities parallel to the slope,
where [latex]{F_{\text{net}\parallel}=w_{\parallel} =mg\:\text{sin}\:(25^{\circ})},[/latex] assuming no friction for this part, so that
is the acceleration.
(b) Including friction. We now have a given value for friction, and we know its direction is parallel to the slope and it opposes motion between surfaces in contact. So the net external force is now
and substituting this into Newton’s second law, [latex]{a_{\parallel} =\frac{F_{\text{net}}}{m},}[/latex] gives
We substitute known values to obtain
which yields
which is the acceleration parallel to the incline when there is 45.0 N of opposing friction.
Discussion
Since friction always opposes motion between surfaces, the acceleration is smaller when there is friction than when there is none. In fact, it is a general result that if friction on an incline is negligible, then the acceleration down the incline is [latex]{a=g\:\text{sin}\theta},[/latex] regardless of mass. This is related to the previously discussed fact that all objects fall with the same acceleration in the absence of air resistance. Similarly, all objects, regardless of mass, slide down a frictionless incline with the same acceleration (if the angle is the same).
RESOLVING WEIGHT INTO COMPONENTS
When an object rests on an incline that makes an angle [latex]{\theta}[/latex] with the horizontal, the force of gravity acting on the object is divided into two components: a force acting perpendicular to the plane, [latex]{\textbf{w}_{\perp}},[/latex] and a force acting parallel to the plane, [latex]{\textbf{w}_{\parallel}}.[/latex] The perpendicular force of weight, [latex]{\textbf{w}_{\perp}},[/latex] is typically equal in magnitude and opposite in direction to the normal force, [latex]\textbf{N}.[/latex] The force acting parallel to the plane, [latex]{\textbf{w}_{\parallel}},[/latex] causes the object to accelerate down the incline. The force of friction, [latex]\textbf{f},[/latex] opposes the motion of the object, so it acts upward along the plane.
It is important to be careful when resolving the weight of the object into components. If the angle of the incline is at an angle [latex]{\theta}[/latex] to the horizontal, then the magnitudes of the weight components are
and
Instead of memorizing these equations, it is helpful to be able to determine them from reason. To do this, draw the right triangle formed by the three weight vectors. Notice that the angle [latex]{\theta}[/latex] of the incline is the same as the angle formed between [latex]\textbf{w}[/latex] and [latex]{\textbf{w}_{perp}}.[/latex] Knowing this property, you can use trigonometry to determine the magnitude of the weight components:
TAKE-HOME EXPERIMENT: FORCE PARALLEL
To investigate how a force parallel to an inclined plane changes, find a rubber band, some objects to hang from the end of the rubber band, and a board you can position at different angles. How much does the rubber band stretch when you hang the object from the end of the board? Now place the board at an angle so that the object slides off when placed on the board. How much does the rubber band extend if it is lined up parallel to the board and used to hold the object stationary on the board? Try two more angles. What does this show?
Tension
A tension is a force along the length of a medium, especially a force carried by a flexible medium, such as a rope or cable. The word “tension” comes from a Latin word meaning “to stretch.” Not coincidentally, the flexible cords that carry muscle forces to other parts of the body are called tendons. Any flexible connector, such as a string, rope, chain, wire, or cable, can exert pulls only parallel to its length; thus, a force carried by a flexible connector is a tension with direction parallel to the connector. It is important to understand that tension is a pull in a connector. In contrast, consider the phrase: “You can’t push a rope.” The tension force pulls outward along the two ends of a rope.
Consider a person holding a mass on a rope as shown in Figure 4.
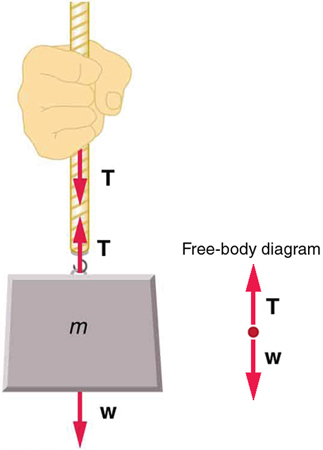
Tension in the rope must equal the weight of the supported mass, as we can prove using Newton’s second law. If the 5.00-kg mass in the figure is stationary, then its acceleration is zero, and thus [latex]{\textbf{F}_{\text{net}}=0}.[/latex] The only external forces acting on the mass are its weight [latex]\textbf{w}[/latex] and the tension [latex]\textbf{T}[/latex] supplied by the rope. Thus,
where [latex]\textbf{T}[/latex] and [latex]{w}[/latex] are the magnitudes of the tension and weight and their signs indicate direction, with up being positive here. Thus, just as you would expect, the tension equals the weight of the supported mass:
For a 5.00-kg mass, then (neglecting the mass of the rope) we see that
If we cut the rope and insert a spring, the spring would extend a length corresponding to a force of 49.0 N, providing a direct observation and measure of the tension force in the rope.
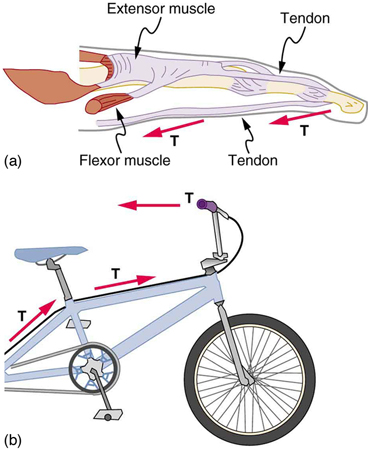
Flexible connectors are often used to transmit forces around corners, such as in a hospital traction system, a finger joint, or a bicycle brake cable. If there is no friction, the tension is transmitted undiminished. Only its direction changes, and it is always parallel to the flexible connector. This is illustrated in Figure 5 (a) and (b).
Example 2: What Is the Tension in a Tightrope?
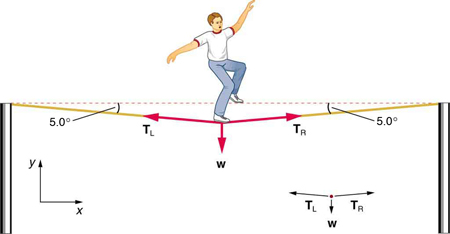
Calculate the tension in the wire supporting the 70.0-kg tightrope walker shown in Figure 6.
Strategy
As you can see in the figure, the wire is not perfectly horizontal (it cannot be!), but is bent under the person’s weight. Thus, the tension on either side of the person has an upward component that can support his weight. As usual, forces are vectors represented pictorially by arrows having the same directions as the forces and lengths proportional to their magnitudes. The system is the tightrope walker, and the only external forces acting on him are his weight [latex]\textbf{w}[/latex] and the two tensions [latex]{T_{\text{L}}}[/latex] (left tension) and [latex]{T_{\textbf{R}}}[/latex] (right tension), as illustrated. It is reasonable to neglect the weight of the wire itself. The net external force is zero since the system is stationary. A little trigonometry can now be used to find the tensions. One conclusion is possible at the outset—we can see from part (b) of the figure that the magnitudes of the tensions [latex]{T_{\text{L}}}[/latex] and [latex]{T_{\textbf{R}}}[/latex] must be equal. This is because there is no horizontal acceleration in the rope, and the only forces acting to the left and right are [latex]{T_{\text{L}}}[/latex] and [latex]{T_{\textbf{R}}}.[/latex] Thus, the magnitude of those forces must be equal so that they cancel each other out.
Whenever we have two-dimensional vector problems in which no two vectors are parallel, the easiest method of solution is to pick a convenient coordinate system and project the vectors onto its axes. In this case the best coordinate system has one axis horizontal and the other vertical. We call the horizontal the [latex]{x}[/latex] -axis and the vertical the [latex]{y}[/latex] -axis.
Solution
First, we need to resolve the tension vectors into their horizontal and vertical components. It helps to draw a new free-body diagram showing all of the horizontal and vertical components of each force acting on the system.
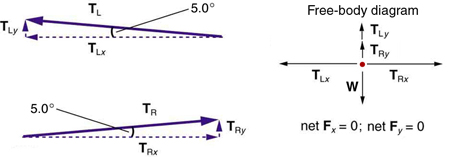
Consider the horizontal components of the forces (denoted with a subscript [latex]{x}[/latex] ):
The net external horizontal force [latex]{F_{\text{net}x}=0},[/latex] since the person is stationary. Thus,
Now, observe Figure 7. You can use trigonometry to determine the magnitude of [latex]{T_{\text{L}}}[/latex] and [latex]{T_{\textbf{R}}}.[/latex] Notice that:
Equating [latex]{T_{\text{L}x}}[/latex] and [latex]{T_{\textbf{R}x}}:[/latex]
Thus,
as predicted. Now, considering the vertical components (denoted by a subscript [latex]{y}[/latex] ), we can solve for [latex]{T}.[/latex] Again, since the person is stationary, Newton’s second law implies that net [latex]{F_y=0}.[/latex] Thus, as illustrated in the free-body diagram in Figure 7,
Observing Figure 7, we can use trigonometry to determine the relationship between [latex]{T_{\text{L}y}},{T_{\textbf{R}y}},[/latex] and [latex]{T}.[/latex] As we determined from the analysis in the horizontal direction, [latex]{T_{\text{L}}=T_{\textbf{R}}=T}:[/latex]
Now, we can substitute the values for [latex]{T_{\text{L}y}}[/latex] and [latex]{T_{\textbf{R}y}},[/latex] into the net force equation in the vertical direction:
and
so that
and the tension is
Discussion
Note that the vertical tension in the wire acts as a normal force that supports the weight of the tightrope walker. The tension is almost six times the 686-N weight of the tightrope walker. Since the wire is nearly horizontal, the vertical component of its tension is only a small fraction of the tension in the wire. The large horizontal components are in opposite directions and cancel, and so most of the tension in the wire is not used to support the weight of the tightrope walker.
If we wish to create a very large tension, all we have to do is exert a force perpendicular to a flexible connector, as illustrated in Figure 8. As we saw in the last example, the weight of the tightrope walker acted as a force perpendicular to the rope. We saw that the tension in the roped related to the weight of the tightrope walker in the following way:
We can extend this expression to describe the tension [latex]{T}[/latex] created when a perpendicular force ( [latex]{F_{\perp}}[/latex] ) is exerted at the middle of a flexible connector:
Note that [latex]{\theta}[/latex] is the angle between the horizontal and the bent connector. In this case, [latex]{T}[/latex] becomes very large as [latex]{\theta}[/latex] approaches zero. Even the relatively small weight of any flexible connector will cause it to sag, since an infinite tension would result if it were horizontal (i.e., [latex]{\theta=0}[/latex] and [latex]{\text{sin}\theta=0}[/latex] ). (See Figure 8.)


Extended Topic: Real Forces and Inertial Frames
There is another distinction among forces in addition to the types already mentioned. Some forces are real, whereas others are not. Real forces are those that have some physical origin, such as the gravitational pull. Contrastingly, fictitious forces are those that arise simply because an observer is in an accelerating frame of reference, such as one that rotates (like a merry-go-round) or undergoes linear acceleration (like a car slowing down). For example, if a satellite is heading due north above Earth’s northern hemisphere, then to an observer on Earth it will appear to experience a force to the west that has no physical origin. Of course, what is happening here is that Earth is rotating toward the east and moves east under the satellite. In Earth’s frame this looks like a westward force on the satellite, or it can be interpreted as a violation of Newton’s first law (the law of inertia). An inertial frame of reference is one in which all forces are real and, equivalently, one in which Newton’s laws have the simple forms given in this chapter.
Earth’s rotation is slow enough that Earth is nearly an inertial frame. You ordinarily must perform precise experiments to observe fictitious forces and the slight departures from Newton’s laws, such as the effect just described. On the large scale, such as for the rotation of weather systems and ocean currents, the effects can be easily observed.
The crucial factor in determining whether a frame of reference is inertial is whether it accelerates or rotates relative to a known inertial frame. Unless stated otherwise, all phenomena discussed in this text are considered in inertial frames.
All the forces discussed in this section are real forces, but there are a number of other real forces, such as lift and thrust, that are not discussed in this section. They are more specialized, and it is not necessary to discuss every type of force. It is natural, however, to ask where the basic simplicity we seek to find in physics is in the long list of forces. Are some more basic than others? Are some different manifestations of the same underlying force? The answer to both questions is yes, as will be seen in the next (extended) section and in the treatment of modern physics later in the text.
PHET EXPLORATIONS: FORCES IN 1 DIMENSION
Explore the forces at work when you try to push a filing cabinet. Create an applied force and see the resulting friction force and total force acting on the cabinet. Charts show the forces, position, velocity, and acceleration vs. time. View a free-body diagram of all the forces (including gravitational and normal forces).
Section Summary
- When objects rest on a surface, the surface applies a force to the object that supports the weight of the object. This supporting force acts perpendicular to and away from the surface. It is called a normal force, [latex]{N}.[/latex]
- When objects rest on a non-accelerating horizontal surface, the magnitude of the normal force is equal to the weight of the object:
[latex]{N=mg}.[/latex]
- When objects rest on an inclined plane that makes an angle [latex]{\theta}[/latex] with the horizontal surface, the weight of the object can be resolved into components that act perpendicular ( [latex]\textbf{w}_{{\perp}}[/latex] ) and parallel ( [latex]\textbf{w}_{{\parallel}}[/latex] ) to the surface of the plane. These components can be calculated using:
[latex]{w_{\parallel} =w\:\text{sin}\:(\theta)=mg\:\text{sin}\:(\theta)}[/latex][latex]{w_{\perp}=w\:\text{cos}\:(\theta)=mg\:\text{cos}\:(\theta).}[/latex]
- The pulling force that acts along a stretched flexible connector, such as a rope or cable, is called tension, [latex]{T}.[/latex] When a rope supports the weight of an object that is at rest, the tension in the rope is equal to the weight of the object:
[latex]{T=mg}.[/latex]
- In any inertial frame of reference (one that is not accelerated or rotated), Newton’s laws have the simple forms given in this chapter and all forces are real forces having a physical origin.
Conceptual Questions
1: If a leg is suspended by a traction setup as shown in Figure 11, what is the tension in the rope?
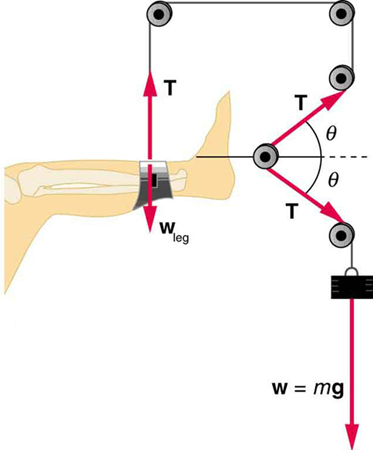
2: In a traction setup for a broken bone, with pulleys and rope available, how might we be able to increase the force along the tibia using the same weight? (See Figure 11.) (Note that the tibia is the shin bone shown in this image.)
Problems & Exercises
1: Two teams of nine members each engage in a tug of war. Each of the first team’s members has an average mass of 68 kg and exerts an average force of 1350 N horizontally. Each of the second team’s members has an average mass of 73 kg and exerts an average force of 1365 N horizontally. (a) What is magnitude of the acceleration of the two teams? (b) What is the tension in the section of rope between the teams?
2: What force does a trampoline have to apply to a 45.0-kg gymnast to accelerate her straight up at [latex]{7.50\text{ m/s}^2}?[/latex] Note that the answer is independent of the velocity of the gymnast—she can be moving either up or down, or be stationary.
3: (a) Calculate the tension in a vertical strand of spider web if a spider of mass [latex]{8.00\times10^{-5}\text{ kg}}[/latex] hangs motionless on it. (b) Calculate the tension in a horizontal strand of spider web if the same spider sits motionless in the middle of it much like the tightrope walker in Figure 6. The strand sags at an angle of [latex]{12^{\circ}}[/latex] below the horizontal. Compare this with the tension in the vertical strand (find their ratio).
4: Suppose a 60.0-kg gymnast climbs a rope. (a) What is the tension in the rope if he climbs at a constant speed? (b) What is the tension in the rope if he accelerates upward at a rate of [latex]{1.50\text{ m/s}^2}?[/latex]
5: Show that, as stated in the text, a force [latex]{F_{\perp}}[/latex] exerted on a flexible medium at its center and perpendicular to its length (such as on the tightrope wire in Figure 6) gives rise to a tension of magnitude [latex]{T=\frac{F_{\perp}}{2\:\text{sin}(\theta)}}.[/latex]
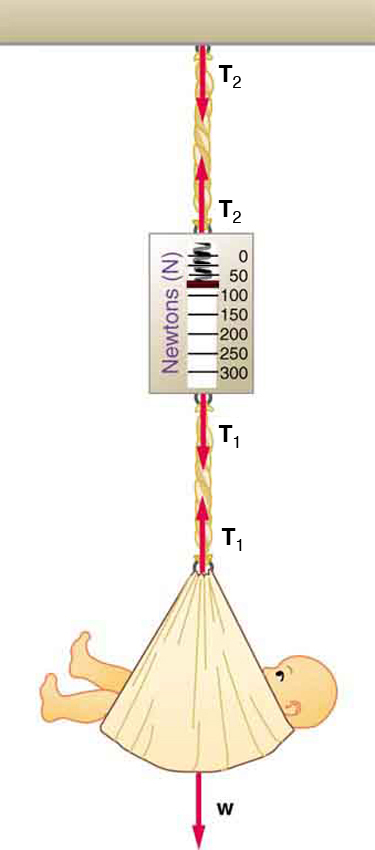
6: Consider the baby being weighed in Figure 12. (a) What is the mass of the child and basket if a scale reading of 55 N is observed? (b) What is the tension [latex]{T_1}[/latex] in the cord attaching the baby to the scale? (c) What is the tension [latex]{T_2}[/latex] in the cord attaching the scale to the ceiling, if the scale has a mass of 0.500 kg? (d) Draw a sketch of the situation indicating the system of interest used to solve each part. The masses of the cords are negligible.
Glossary
- inertial frame of reference
- a coordinate system that is not accelerating; all forces acting in an inertial frame of reference are real forces, as opposed to fictitious forces that are observed due to an accelerating frame of reference
- normal force
- the force that a surface applies to an object to support the weight of the object; acts perpendicular to the surface on which the object rests
- tension
- the pulling force that acts along a medium, especially a stretched flexible connector, such as a rope or cable; when a rope supports the weight of an object, the force on the object due to the rope is called a tension force
Solutions
Problems & Exercises
1:
(a) [latex]{0.11\text{ m/s}^2}[/latex]
(b) [latex]{1.2\times10^4\text{ N}}[/latex]
3:
(a) [latex]{7.84\times10^{-4}\text{ N}}[/latex]
(b) [latex]{1.89\times10^{-3}\text{ N}}.[/latex] This is 2.41 times the tension in the vertical strand.
5:
Newton’s second law applied in vertical direction gives
